本文为本人调试Xavier时遇到的,演示了如何开启Nvidia Jetson Xavier开发者套件的CAN总线,是一篇非常优秀的指导文章。本文原作者为Ramin Nabati,由SPtuan获取其授权并翻译。原文链接为:
https://medium.com/@ramin.nabati/enabling-can-on-nvidia-jetson-xavier-developer-kit-aaaa3c4d99c9
在Nvidia Jetson Xavier开发者套件上,共有2路CAN(Controller Area Network)控制器,但是板上没有CAN收发器。而收发器可以很轻松地连接上 Jetson Xavier套件。在这个教程中,我将介绍并示范在Jetson Xavier启用CAN控制器的所有步骤。
步骤为,首先配置GPIO引脚并启用CAN控制器,最后连接CAN收发器。
Table of Contents
1 启用CAN控制器
可以看出Jetson Xavier有一组GPIO扩展口,CAN 控制器可以在此引出。但是,CAN控制器对应的引脚被默认配置为符合Raspi 40引脚标准的GPIO,因此我们首先需要进行引脚配置,来打开CAN功能。根据Nvidia Xavier开发人员论坛上的这篇文章,有两种方法可以重新配置这些引脚。第一种方法是使用特定的pinmux配置闪烁Xavier,但是要求重新使用Jetpack刷写Xavier固件。由于不想重新刷写Xavier,因此我选择第二种解决方案。
第二种解决方案,是使用寄存器读写工具来覆盖CAN控制器引脚对应寄存器值。唯一的问题是这些设置不是持久的,这意味着每次重新启动Jetson Xavier时都需要重复这些操作。
可以通过编写在系统启动时自动运行的脚本来解决问题。在Jetson Xavier上打开一个终端并按照以下步骤操作。
- 安装busybox以更改寄存器值
sudo apt-get install busybox
- 重新配置与CAN控制器引脚对应的四个寄存器值,如下
sudo busybox devmem 0x0c303000 32 0x0000C400 sudo busybox devmem 0x0c303008 32 0x0000C458 sudo busybox devmem 0x0c303010 32 0x0000C400 sudo busybox devmem 0x0c303018 32 0x0000C458
- 然后使用
modprobe命令安装CAN控制器并加载驱动程序
sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan
- 接下来根据你的要求配置CAN控制器。下面的例子是CAN比特率(Bitrate)设置为500 Kbps,启用灵活数据速率(FD),将有效负载比特率设置为2 Mbps,启用总线错误报告。如果您暂时不确定自己的配置,可以只设置
bitrate值并忽略其他选项
sudo ip link set can0 type can bitrate 500000 \
dbitrate 2000000 berr-reporting on fd on
sudo ip link set can1 type can bitrate 500000 \
dbitrate 2000000 berr-reporting on fd on
- 然后开启CAN
sudo ip link set up can0 sudo ip link set up can1
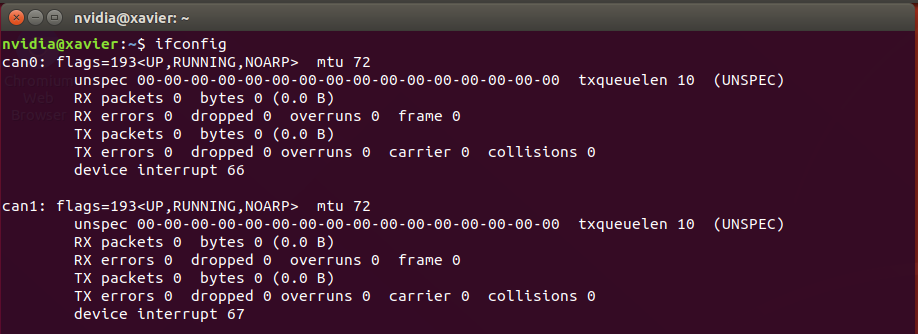
- 使用
ifconfig命令以检查CAN是否成功启用。应该能看到can0和can1这两个网络设备,如下图
- 恭喜!你已经完成了CAN的设置。由于重启后会失效,接下来创建一个
enable_CAN.sh以实现系统启动时自动配置
touch /enable_CAN.sh chmod 755 /enable_CAN.sh
(译者注:不要盲目复制命令,如果遇到权限不足时可尝试使用sudo提升权限)
- 接下来编辑这个脚本。你可以使用vim、nano、gedit等你最喜欢的工具
#!/bin/bash sudo modprobe can sudo modprobe can_raw sudo modprobe mttcan sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on sudo ip link set up can0 sudo ip link set up can1 exit 0
- 如果你的Jetson Xavier上已经有了文件
/etc/rc.local,请直接跳至下一步。如果它不存在,在终端中运行以下命令来创建它。(译者注:/etc/rc.local为开启自动启动脚本,如果你不喜欢优雅的脚本管理,可以将上述脚本直接写在/etc/rc.local的exit 0前)
printf '%s\n' '#!/bin/bash' 'exit 0' | sudo tee -a /etc/rc.local sudo chmod +x /etc/rc.local
- 在
/etc/rc.local文件中的exit 0行前添加以下行:
sh /enable_CAN.sh &
- 不出意外,你的
/etc/rc.local应该是这样的
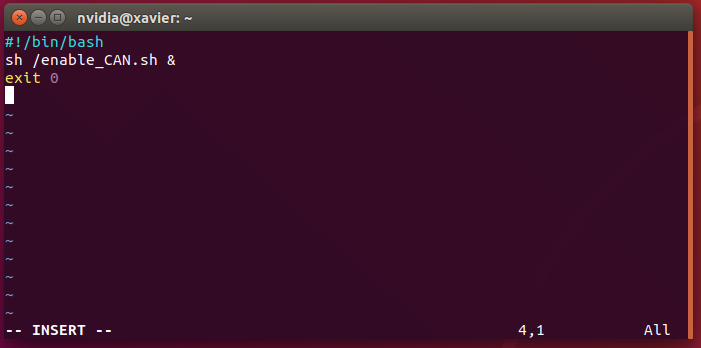
现在系统启动时应该能够自动运行enable_CAN.sh脚本并配置CAN控制器了。可以重新启动Jetson Xavier,在终端中运行ifconfig命令,检查是否看到can0和can1设备。
2 安装CAN收发器
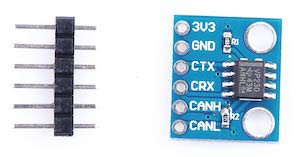
KNACRO CAN总线收发器
我使用了两个KNACRO CAN总线收发器进行设置,两个CAN总线连接起来。如果只需要一路CAN总线,安装一个收发器即可。我使用的收发器工作电压为3.3V,并且已经在总线上焊接了120欧姆的终端电阻。
(译者注:CAN总线收发器模块很常见,在淘宝上直接搜索即可。)
Jetson Xavier上扩展GPIO引脚排列以及引脚#1的位置如下图。
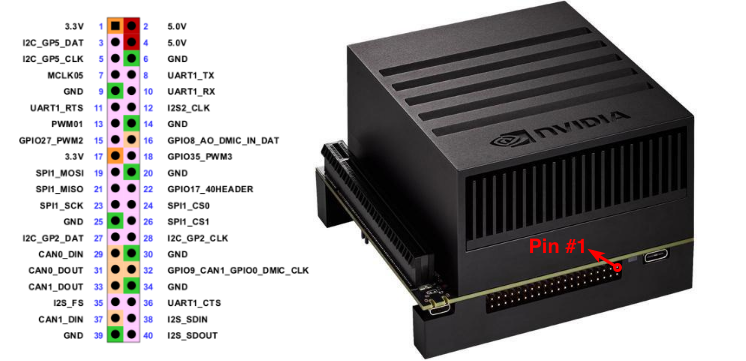
Nvidia Jetson Xavier扩展接头引脚
我们首先将扩展接头连接器的引脚#29(CAN0_DIN)和引脚#31(CAN0_DOUT)分别连接一个收发器上的CRX和CTX引脚。同样,引脚#37(CAN1_DIN)和引脚#33(CAN1_DOUT)连接到另一个收发器上的CRX和CTX引脚。
另外,CAN收发器需要供电,因此还需要将扩展插头连接器上的两组3.3V和GND引脚分别连接到收发器上的3V3和GND引脚。下图演示了引脚连线图。
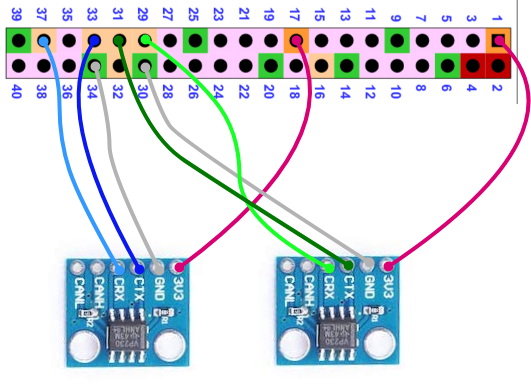
收发器和扩展接头之间的接线
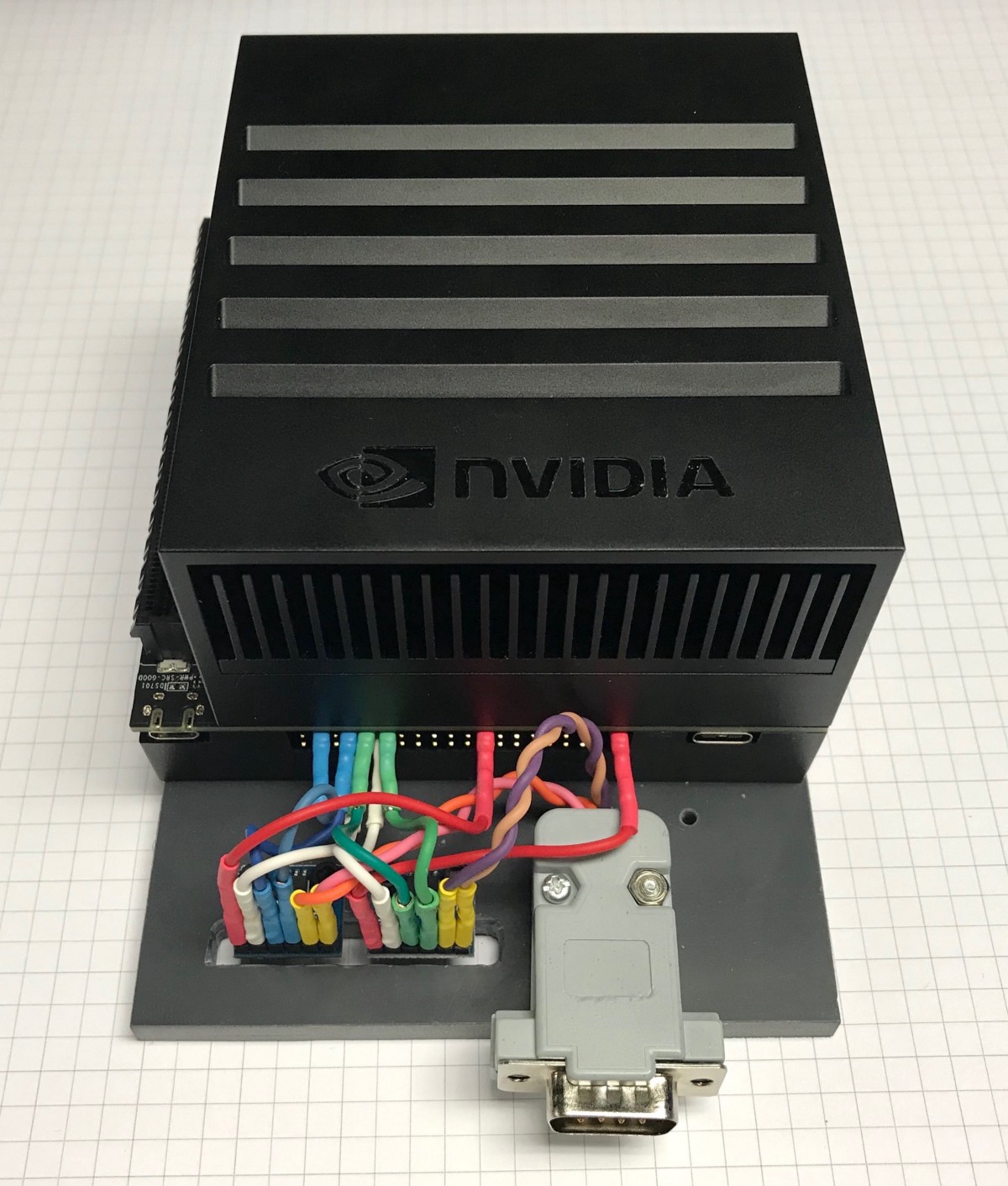
收发器上的CANH和CANL引脚需要连接到要与之通信的两条CAN总线的CAN高电平和CAN低电平线,即接入CAN网络。为了放置这两块小PCB板,我制作了个平台,如下图。
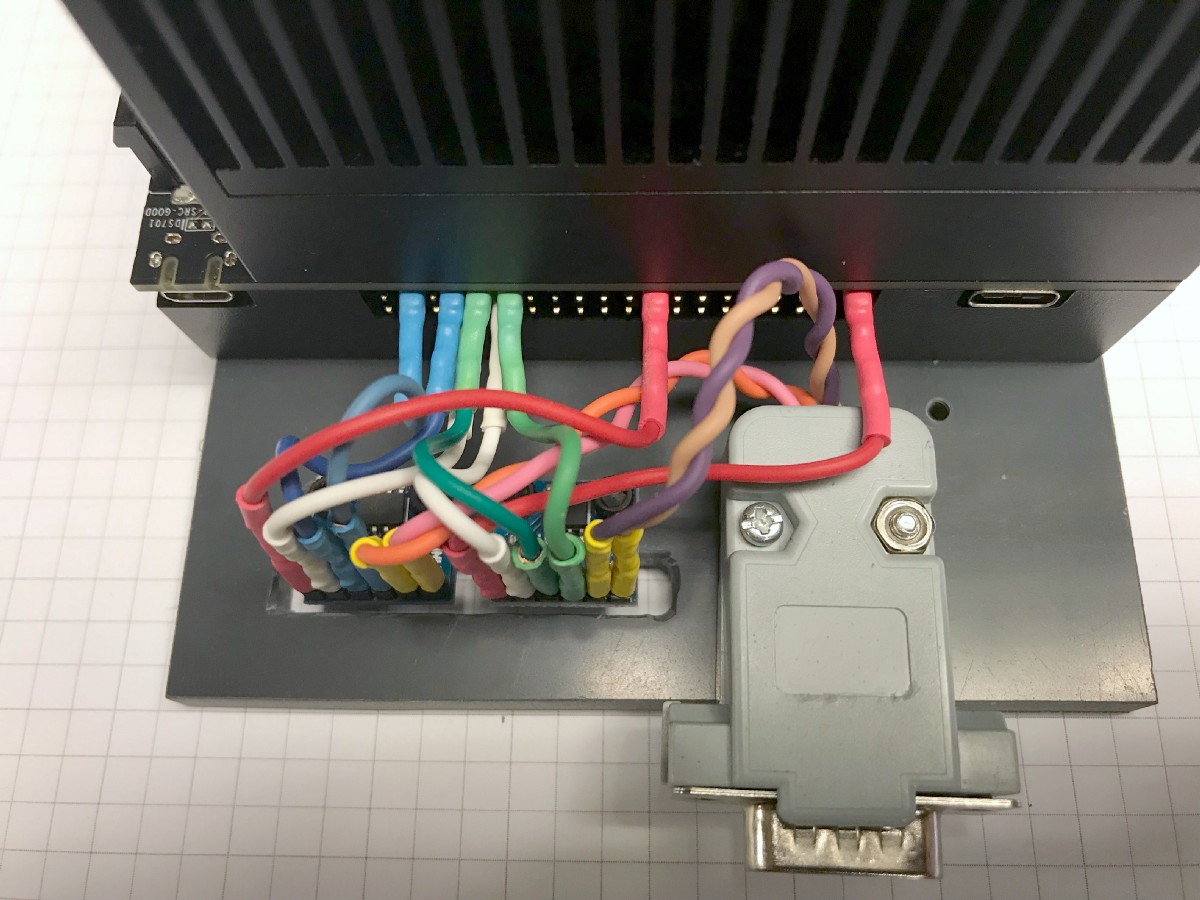
如上图所示,我使用DB-9连接器接入CAN总线。两组绞合线分别为是CAN0和CAN1的CANH和CANL线。为了保持低错误率,CAN高和CAN低电线通常是扭曲的(译者注:CAN总线使用双绞线形式,以减少干扰)。在DB-9连接器上,我用引脚1和8连接CAN0低和高,针脚2和7对应CAN1低和高。您可以按照自己的需求安排DB-9引脚。
3 笔记
- 根据Jetson AGX Xavier规范和文档,由于默认启用SoC内部的3.3V上拉电阻,系统上电时,引脚37,29,33和31将被拉至3.3V。因此,您使用的收发器必须能够在其CTX和CRX引脚上应对初始的3.3V电压。本教程中使用的收发器似乎正在处理这个初始的3.3V,没有发生任何问题。
- 有一组非常方便的脚本:https://github.com/hmxf/can_xavier。
4 译者注
在使用Jetson Xavier开发者套件时,您可能还对以下资源感兴趣:
- JetsonHacks https://www.jetsonhacks.com/
- 是一个专门分享Jetson套件的网站,有一些非常方便的脚本,例如在TX2、Xavier上一键编译OpenCV,自定义系统内核工具等等
- https://www.jetsonhacks.com/nvidia-jetson-agx-xavier-gpio-header-pinout/
- Xavier GPIO定义和IC2等接口开启方法



你好,你那个 rc.local 里面并未包含控制器引脚配置的命令,重启之后不需要?
艹 带哥这不是PX2啊,咋又换到TX2去了
@John Raymond 啥玩意儿?这是Jetson Xavier啊
@John Raymond 你说的DRIVE Xavier吧?那玩意儿也就贵司能有一两个了
@SPtuan 你好作者,我想问一下,我的工控机可以正常发送信息通过can收发器发送数据到win系统的cantest软件,但是不能通过win发给工控机,想咨询以下你
@15393083471 如果 win 通道多的话,可以试着自己给自己发,看看是不是根本没有发送出去