我文笔太烂,博客更多是给自己记录。刚刚过完春节,如果现在不动笔,可能就再也想不起来2019都干了啥。还是写一份文章,留给以后看看。
想用一条线索串起2019比较困难,还是用若干碎片的形式组织起来吧。若是有撞进博客的读者,您权当看个热闹。
Table of Contents
值得一提的项目和里程碑
2019年世界智能驾驶挑战赛

图: 天津大学智能驾驶车辆在世界智能驾驶挑战赛(非商业使用-图片版权归挑战赛组委会所有)
2019年上半年主要在忙自动驾驶挑战赛的工作。车辆是BYD的一款SUV,提供线控控制。
得益于熊队、高大神等上代队员设计的清晰合理的软件架构和文档,软件上重构和迭代的速度是比较理想的。
相比于在虚拟仿真平台上的前期测试,最大的困难就是实车控制系统的稳定性和车辆状态(包括线控、电气等)。车辆能够坚持完赛乡村越野赛和城市道路赛,令人欣慰。
车队作为天津市的东道主车队,能得到组委会的信任,对央视跑下乡村越野赛的表演赛,非常感谢。
感谢给予指导支持的老师,感谢奋战的战友们!下次我们会做的更好。

图: 央视直播源与视觉系统回放
说实话,车队今年准备时间仓促,我也使出了吃奶的力气,为了能在上赛场之前多做一些工作,主要如下:
1. 推动接入虚拟平台测试流程,完成自动驾驶软件与虚拟测试平台的Bridge
上代平台是直接使用实车测试进行软件迭代的,好处就是所见即所得,实车跑出来的结果,上了道路就是什么结果。
今年实验室购入了SCANeR Studio,推动支持对全车开发流程的虚拟环境场景测试。这大大加速了自动驾驶软件的开发迭代速度,主要是对自动驾驶仿真数据流的验证。但缺点是明显的,车辆模型偏离于实车,上车需要重新调参。
Bridge层用于承接原自动驾驶软件对线控车辆的控制,应用于虚拟仿真平台;同时对传感器数据进行缓冲对接。
2. 建立自动驾驶软件开发流,重构各软件模块为ROS节点,方便直接使用ROS工具调试和调度
得益于熊队和高大神的软件模块设计,将所有模块(定位、规划、控制等)重构为ROS节点。也包括一些传感器缓冲和个模块系统架构设计开发等琐碎的工作。
这样做的好处,第一可以使用ROS的消息订阅机制,第二就是ROS完善的调试和监视工具,比如强大的Rviz,对中间节点计算量进行可视化调试,大大节省实车调试的迭代工作,快速定位问题。
尝试着建立了组内的标准开发流程,并自建工具支持(一部分见:经历记录:在团队中推广Git版本管理系统)。这部分相信和专业公司团队的流程相比,有所欠缺,但是确实组内大大加速了开发沟通和进行的速度。
3. Motion Planning 轨迹规划器核心开发
开发了核心Motion Planning轨迹规划方法。这部分主要参考的是《Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame》。相信目前在做Moiton Planning的小伙伴们一定看过这篇文章。第一次看到时,惊叹于于这种把参考轨迹的Frenet坐标系的方法,轨迹生成和评价方式也是高效又简洁~
后来,研究生的题目也开在了Motion Planning这块。我还得修炼一下,现在的我还是太过年轻。等我有了一些自己的见解,我再来和小伙伴们讨论请教。
校内V2X智能网联测试场建立
下半年主要完成了开题这一件大事。同时也完成了研究生阶段的所有课程。在2019下半年,我协助了天津大学校内V2X智能网联测试场的建立。
天津大学校内V2X智能网联主要是闫博士在忙前忙后的工作,处理各项事宜,感谢闫博士。
“5G智能网联技术联合创新中心”落户天津大学 - 天津市工业和信息化局

图: V2X绿波通行与5G视频回传DEMO
我做的工作主要是车辆方面的对接,我们和合作方工程师一起,做了一下功能的DEMO演示
- 绿波通行端
- 5G视频实时回传
- V2V防碰撞(我的主要工作)
要是我让看看V2X和5G的话,确实需要很多的探索才能逐渐走入千家万户。
目前缺乏一个通用的应用层的定义,直白的说,就是有了“互联高速稳定的通信”后,我们的应用层应该做什么、能做什么、如何大范围的问题。和工程师对接时,他回答:针对应用层的需求,你提出什么,我就配合你做什么。
LeetCode与PAT考试
今年9月开始接触LeetCode,之前有准备过浙大PAT考试,所以没有遇到太大的瓶颈,一般有闲碎时间会做一下。我的Github基本用来更新解题记录了。
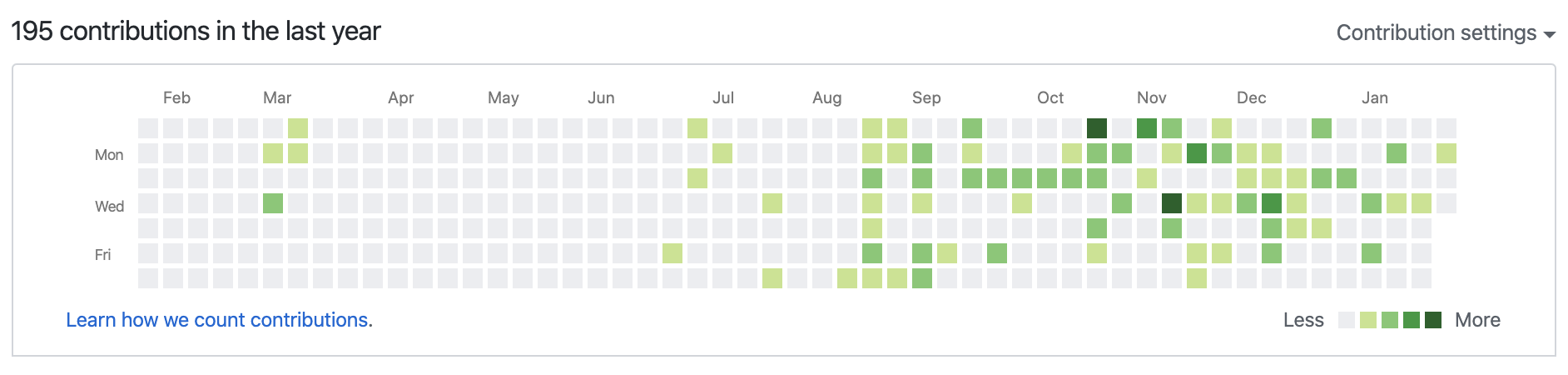
图:本辣鸡的1年Github提交热力图
截止本文总结,LeetCode题目量163,Easy81,Medium72,Hard10。另外PAT练习题大概有100左右。
另外我也参加了今年的PAT等级测试,甲级拿了86,20分的题目一个大用例没有调试出来,非常可惜。有一个奇怪的现象:1年前我还没有接触过机试题目,去甲级凑热闹拿到了63分,排名300。而今年虽然分数86,排名仍然是300。看来行业内卷将变得非常严重。
高校里某些系总是抱怨,“为什么青年学生都走了”。如果该行业前10%的顶尖人才都转行,那么就需要反思一下了,围追堵截真的有用吗。
学会生活了吗
我曾经有一个信条,叫做:“生活的技能随时都可以学会,所以要搞一些限时的收获和技能!”。
现在,我会完全否定它。生活的技能不是随时都可以学会的,如何让自己学会生活,主要是学会享受生活、在生活中得到成倍的乐趣,有可能是学不会的。
所以,这可能就是我这一年餐饮消费数字暴增的原因吧。复杂的快乐源泉找不到,吃得开心总是可以的吧!
smzdm上一直有人在秀桌面,我一开始感觉无聊,但是后来感觉还是很有仪式感的,年终了,我也放一张我的桌面吧。

图:年终了,让我任性一把放上一张桌面图
什么?很乱?那是当然!因为我随时准备收拾东西立即跑路呀!哈哈哈,就是我的人体工学椅不好搬走。
这种简单的行动都是对无聊生活的挖掘,用来获得快乐,击败无趣。这些是我之前未体会到的。
所以,新的一年,我许愿一定要找到快乐的源泉。
出行
今年印象深刻的2次出行都写在博客中了:
其中强推7月份去的HK一行,实在是过于魔幻,赛博朋克。
https://steinslab.io/archives/1764
https://steinslab.io/archives/1833
装备购置
mi boy 9 se
我不是米boy,之前的大法Xperia X是在太卡了,根本无法适应国内唤醒的重量负载……
于是按照需求买了一部Mi 9 se。中规中矩的手机,我没有需求。
林檎电脑Pro 13寸2019低配版
为什么买林檎电脑?因为我盘算了一下,我已经1年没有打开任何3A游戏了,加上我平时也就是刷刷题,看看PDF,写一些有用没用的文档。至于生产和开发环境,有专用的设备,不必烧自己电脑,就购置了林檎电脑。
要性能?脚下有一台2Xeon E5+4Nvidia Titan X+128GB服务器,自己设备再高就没必要了吧。
开箱:共 享 Moment - https://www.bilibili.com/video/av78258693
尾声
本来是想写几百字就结束的。没想到写了挺多的。原以为2019的我碌碌无为,没想到也做了点事情。
新的一年,我最大的愿望是,一定要找到快乐的源泉、生活的动力。也祝愿大家永远身体健康,永远不脱发!多陪陪家人,少一些戾气。
希望新的一年能和佟老师吃更多的美食,尤其是日料。
最后送一张彩蛋,是原本准备年前放出来的同人志。不过画师比较忙,我年前身体不舒服就鸽了。不过,明年过年前,一定会出来的吧!哈哈哈



别担心,人体工程学椅子被照顾的很好,btw我劳动节后也要跑路啦(内心狂喜):-)
[…] 2020-01-30 2019项目和历程总结——只要我们不断地前进,道路就会延伸 […]
哇太精彩了!早日找到快乐源泉呐
@初夏阳光 同样祝福!大学时光是最爽的,更加温柔地对待家人和自己 ^_^
草,板凳点赞
@WANG 狠?2019不总结?虽然已经是3月末了额
草,板凳
居然没有评论,抢个沙发,给鸡汤博主点赞
@fandy 鸡汤过于生草,难道不是倒垃圾博主?